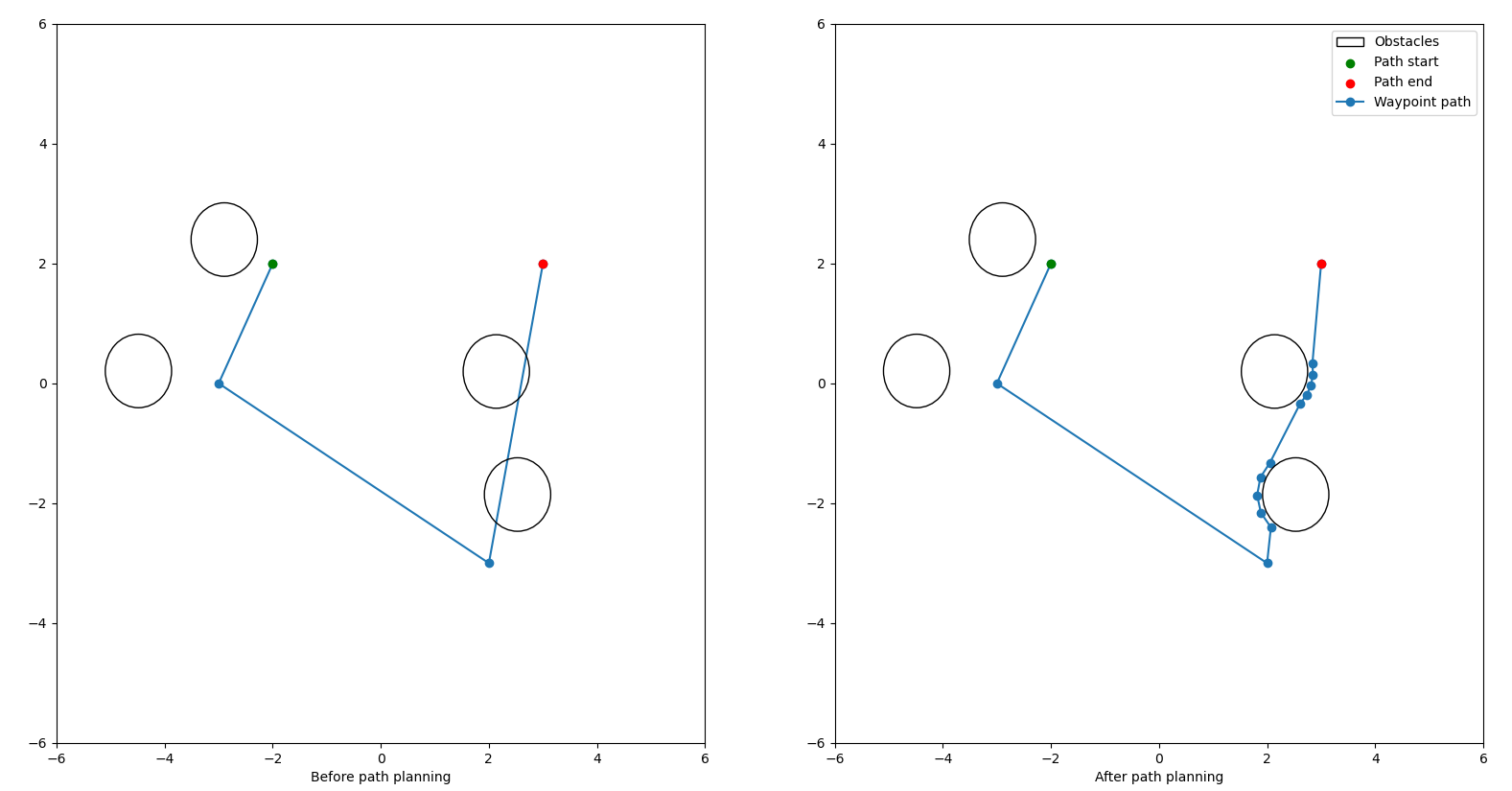
Path planning on a low number of obstacles
A gridless path planner
During the 2022-2023 school year, we pursued two different strategies for improving our path planner. One was to rewrite A* and the accompanying computer vision in C++ as well as to perform some simple optimizations. The other, which I worked on, was to research and create an implementation of a gridless path planner. Although the implementation of our gridless path planner, Tangent Based path planning, was not yet capable of adequately competing with the rewritten and optimized A* by the time of IGVC 2023, it presents a promising opportunity. We hope to deploy the algorithm in 2024. For now, it remains one of the only implementations of Tangent Based path planning in the world.
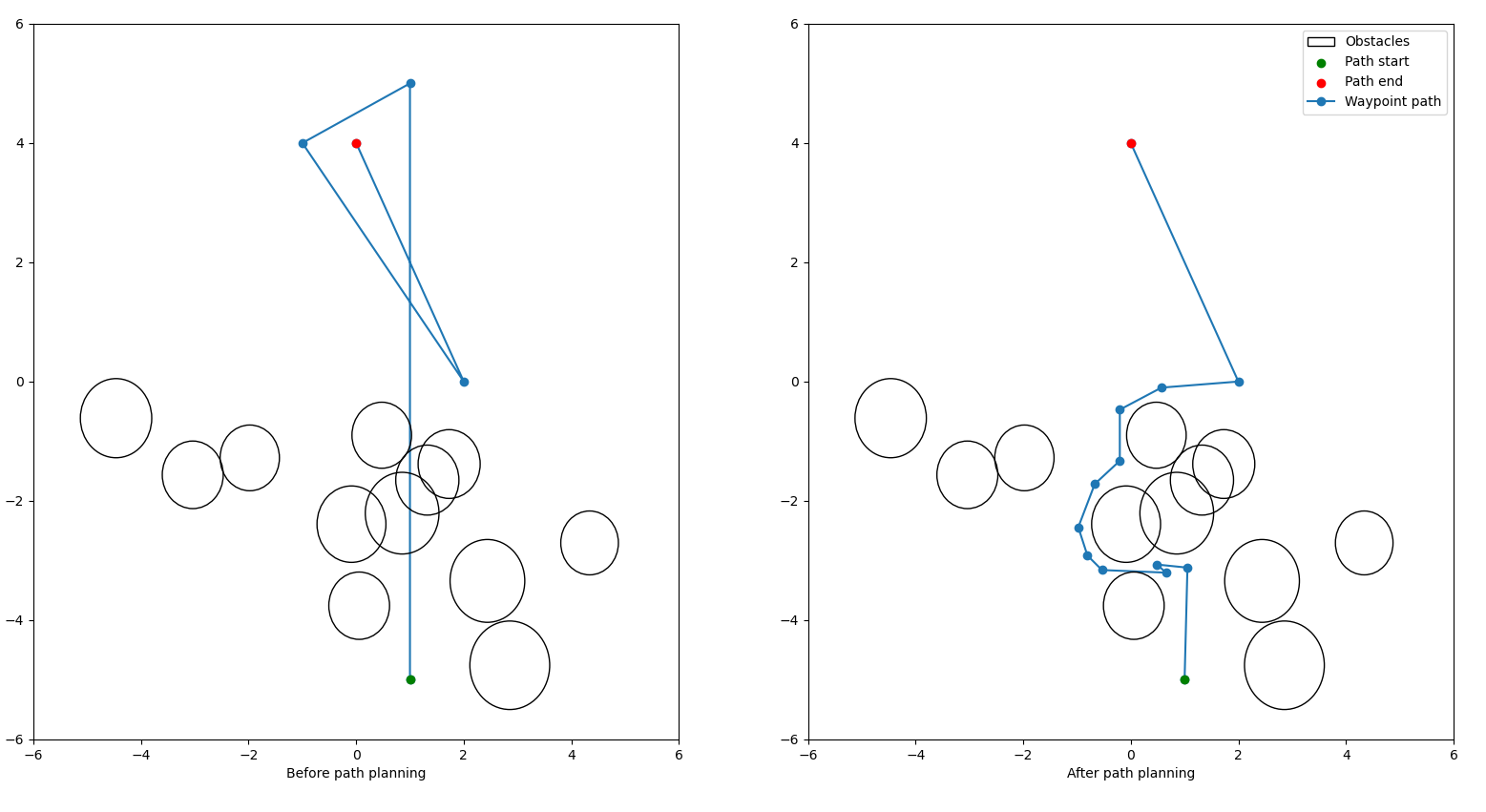
Path planning on a realistic number of obstacles
Quick computations regardless of size
The advantage of a gridless path planner is that it does not require iterating over a grid. This saves a significant amount of computation time. It also means that the algorithm scales to any size without any downside. An issue with previous years path planners was that the grid of particles in computer vision needed to be expanded to the size of the robot. With Tangent Based path planning this is completely unnecessary. The limitations on scale are defined by number of objects, not object size. This benefits applications where obstacles may be large but not exceedingly numerous, as is the case in IGVC.
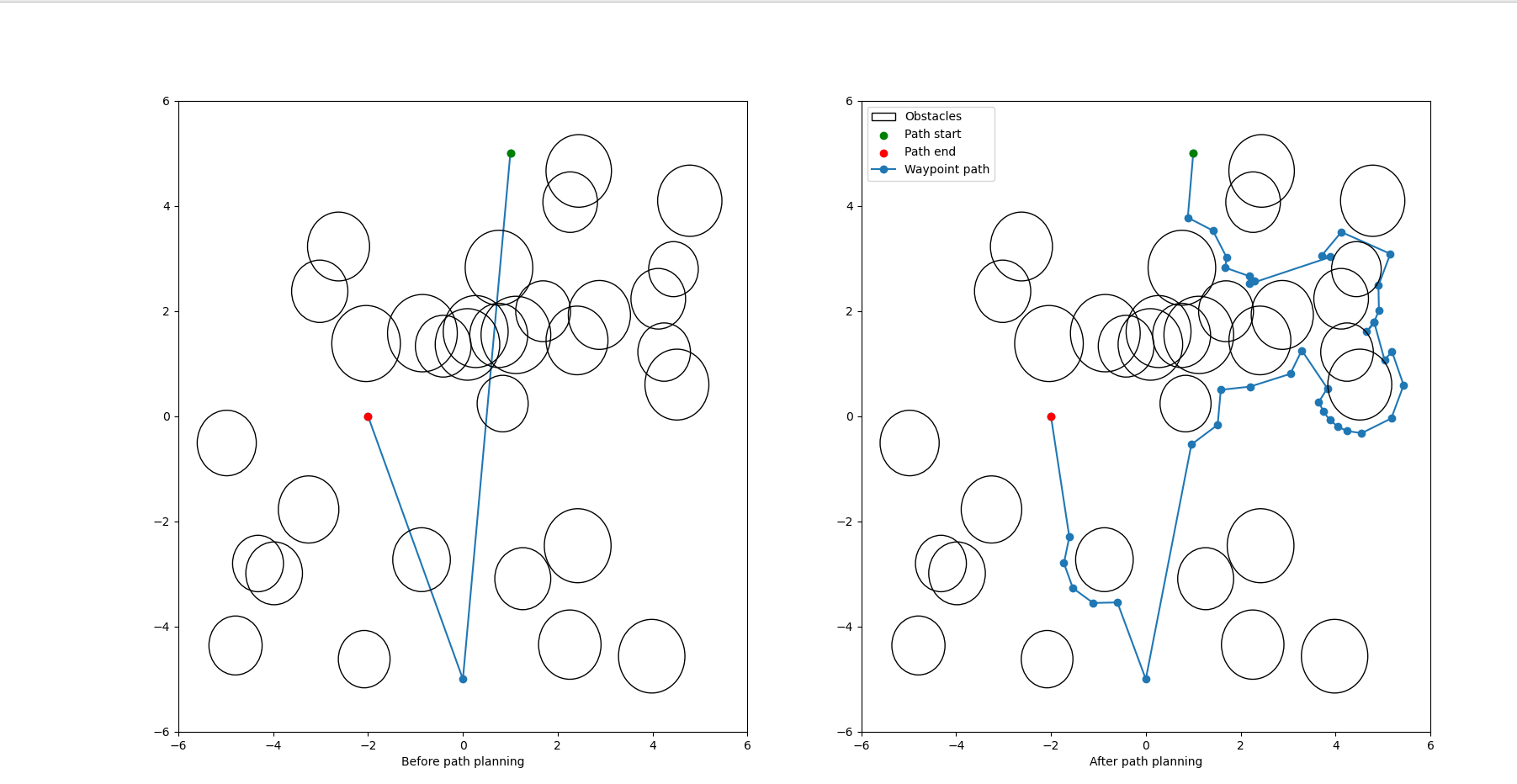
Stress testing with a large number of obstacles
ROS 2 Integration with Pure Pursuit